There are multiple vague scenarios as follows:
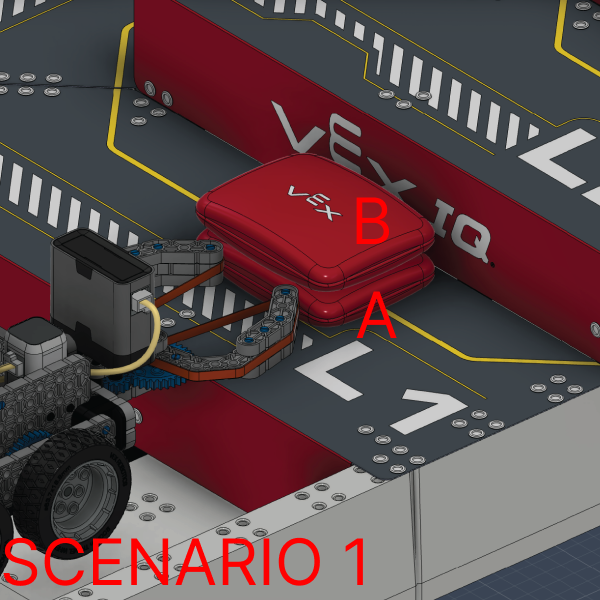
Scenario 1:
Bean Bag B is stacked on top of Bean Bag A. Both Bean Bag A and Bean Bag B meet all criteria listed in <SC4> except that a Robot is contacting Bean Bag A.
What is the scoring status of Bean Bag A and Bean Bag B?
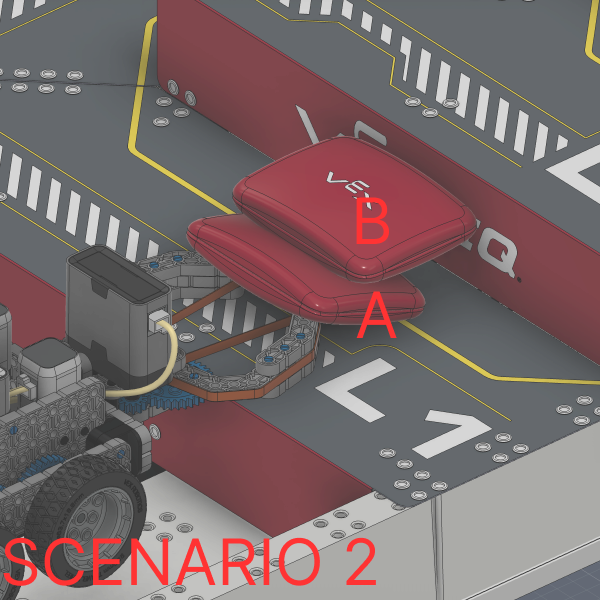
Scenario 2:
Bean Bag A is lifted by a Robot such that it is at approximately a 45-degree angle and is supported by both the Robot and the PET sheet of the Goal. Bean Bag B is stacked on top of Bean Bag A. Both Bean Bag A and Bean Bag B meet all criteria listed in <SC4> except that a Robot is contacting Bean Bag A.
What is the scoring status of Bean Bag A and Bean Bag B?
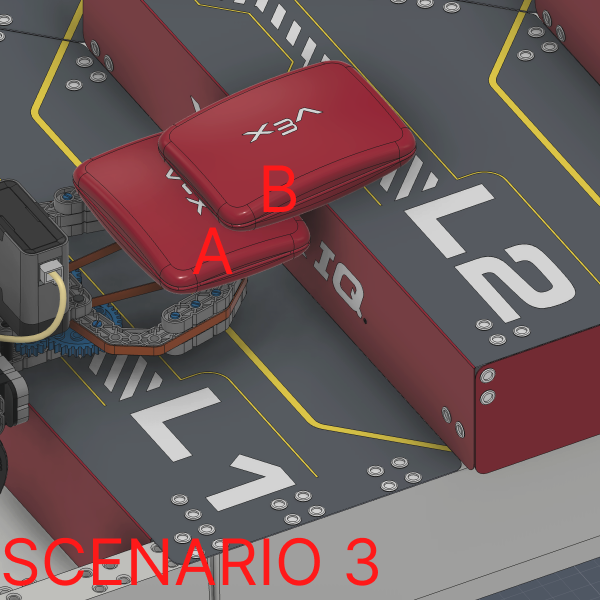
Scenario 3:
Bean Bag A is lifted by a Robot and is not in contact with the PET sheet. Bean Bag B is partially stacked on top of Bean Bag A and is in contact with the L2 PET sheet. Bean Bag B meets all criteria listed in <SC4>.
Is the Robot considered to be Possessing Bean Bag A and/or Bean Bag B?
What is the scoring status of Bean Bag A and Bean Bag B?
Furthermore, if Bean Bag B is gradually pushed from a position where it is closest to the Robot and only barely contacting the L2 PET sheet, to a position where it is fully in contact with the L2 PET sheet while still slightly contacting Bean Bag A — at what point does the scoring status and/or Possession status change?
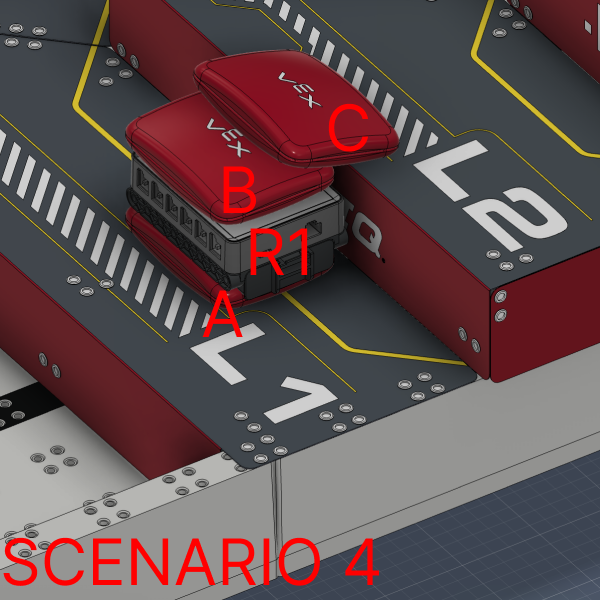
Scenario 4:
R1 is a stationary Robot that consists of subsystems 1 and 2 as defined in <R1>. R2 is another Robot in the same Match. Both Robots are placed in legal pre-Match starting positions and meet all criteria listed in <SG1> before the start of the Match.
After the Match begins, R2 uses its manipulator to carefully place R1 on top of Bean Bag A, then stacks Bean Bag B on top of R1.
Bean Bag A is in contact with the L1 PET sheet. R1 is fully supported by Bean Bag A and is no longer in contact with the Floor or any Field Elements. Bean Bag B is stacked on R1. Bean Bag C is partially stacked on Bean Bag B and is in contact with the L2 PET sheet.
Bean Bag A and Bean Bag B should not be scored because they are contacting a Robot. However:
Is R1 considered to be Possessing Bean Bag C?
For Bean Bag C, is it considered supported by Bean Bag A (via R1)?
What is the scoring status of Bean Bag C?
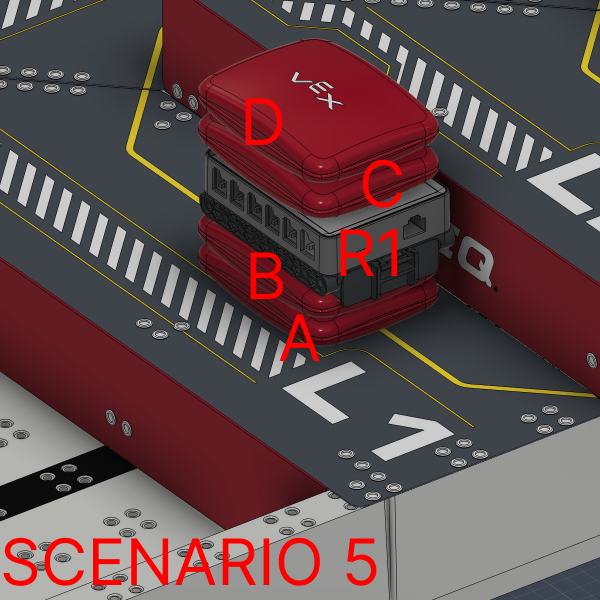
Scenario 5:
Similar to Scenario 4, is R1 considered to be Possessing Bean Bag D?
For Bean Bag D, is it considered supported by Bean Bag A (via R1)?
What is the scoring status of Bean Bag D?
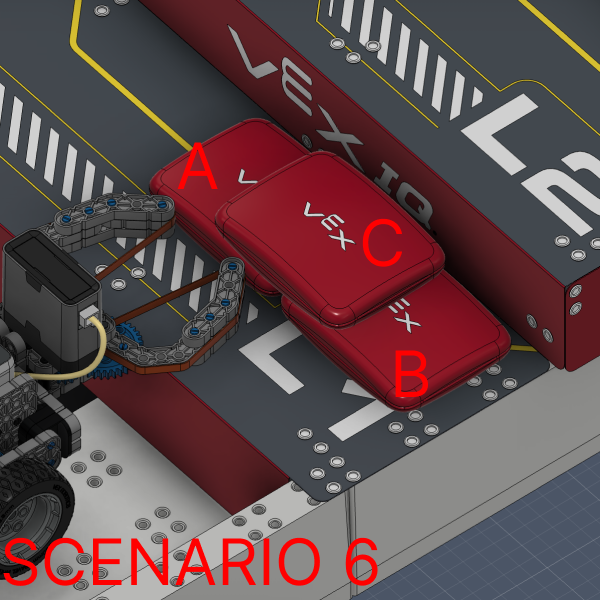
Scenario 6:
Bean Bag C is stacked on top of both Bean Bag A and Bean Bag B. All three Bean Bags meet all criteria listed in <SC4> except that a Robot is contacting Bean Bag A.
What is the scoring status of Bean Bag A, Bean Bag B, and Bean Bag C?
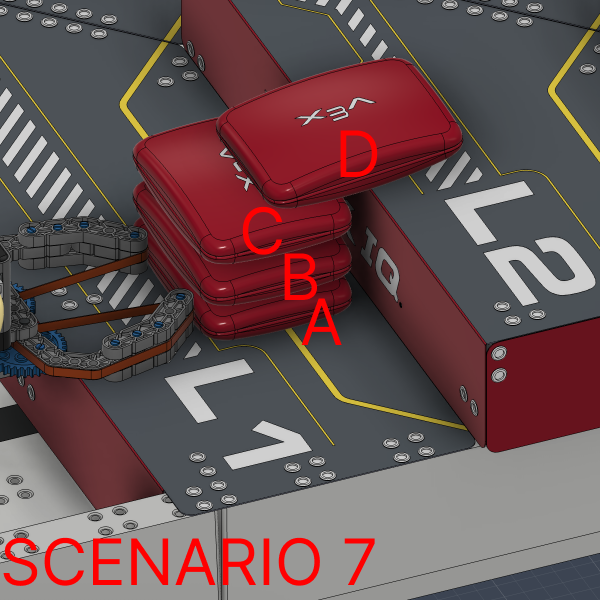
Scenario 7:
Bean Bag D is partially stacked on Bean Bag C and is in contact with the L2 PET sheet.
Bean Bag C is stacked on top of Bean Bag B, which is stacked on top of Bean Bag A. Bean Bag A is in contact with the L1 PET sheet. All four Bean Bags meet all criteria listed in <SC4> except that a Robot is contacting Bean Bag A.
What is the scoring status of Bean Bag A, Bean Bag B, Bean Bag C, and Bean Bag D?